本篇目录:
- 1、伺服电机怎样控制?
- 2、西门子plc控制伺服电机的方法及举例(最好带有梯形图讲解)
- 3、安川5代伺服驱动器的主板是否可以互相代换
- 4、伺服电机怎样控制???
- 5、欧姆龙PLC控制伺服电机时用的INI和PRV指令各是什么意思?
- 6、PLC怎么控制伺服电机的速度?
伺服电机怎样控制?
伺服电机的控制方式最常见的是速度控制模式,比如舞台上的氛围灯。通过控制电机不同的转速来实现光线的来回变化。最精确的是位置模式,比如组装车辆的机械臂,如果精度不够,无法实现准确的安装。
一般伺服电机都有三种控制方式:速度控制方式、转矩控制方式、位置控制方式。速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求满足何种运动功能来选择。
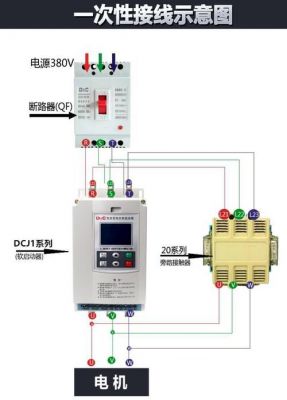
-图1")
伺服电机系统有三种控制方式,即转矩控制,速度控制,位置控制。第一,转距控制是通过外部模拟量的输入或者直接的地址的赋值来设定电机轴对外输出转矩的大小,速度控制是通过模拟量的输入或者脉冲的频率对转动的速度进行控制。
伺服电机的控制方式:速度模式,力矩模式,位置模式。速度模式,通过对电机驱动脉冲的改变来控制电机的运转速度。比如舞台的灯光,可以加速也可以减速。力矩模式,输出的力矩是恒定的。
最常见的伺服电机控制模式是速度模式和力矩模式。速度模式通过改变电机的电流或者电压来改变电机转动的速度,达到想要的效果。力矩模式最常见的就是线切割,设定程序后设备保持一定的力矩进行切割。伺服电机分交流驱动和直流驱动。
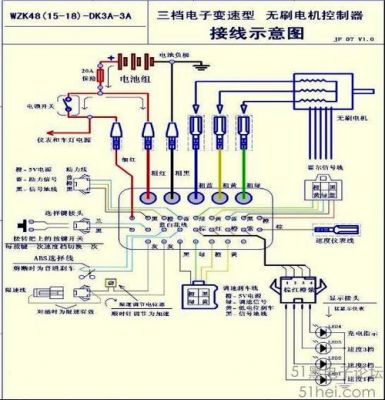
-图2")
问题一:如何选择伺服电机控制方式? 一般伺服电机都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式 。如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
西门子plc控制伺服电机的方法及举例(最好带有梯形图讲解)
在远程工作模式时,进行位置控制,由DCS通过Profibus DP通讯,发送目标位置值S120,控制流道闸板上升或下降。硬件配置:S120的控制单元选用CU310-2DP,功率单元选用PM340,配合西门子1FT7高性能电机。
专业的是采用FM354 定位模块, CPU315T, CPU317T 加ADI4 控制带模拟输入速度给定的伺服驱动器和伺服电机。如果采用西门子带总线通讯的伺服驱动则只要CPU315T和CPU317T通过总线通讯就可以组成伺服系统了。
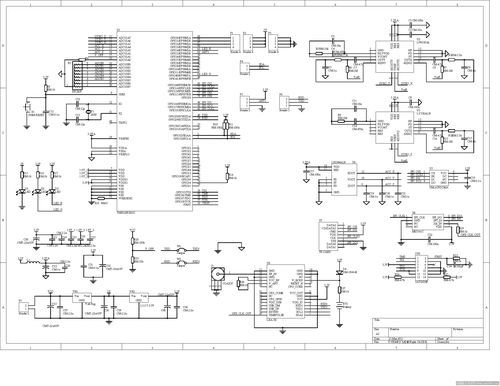
-图3")
伺服电机最主要的应用还是定位控制,PLC对伺服电机的位置控制。位置控制有两个物理量需要控制,那就是速度和位置,确切的说,就是控制伺服电机以多快的速度到达什么地方,并准确的停下。
学习伺服电机控制,最好要一套伺服驱动器+伺服电机,某宝上也就8百块钱。
plc与伺服电机控制接线图:PLC使用高速脉冲输出端口,向伺服电机的脉冲输入端口发送运行脉冲信号。伺服电机使能后,PLC向伺服电机发送运行脉冲,伺服电机即可运行。
安川5代伺服驱动器的主板是否可以互相代换
1、面板处理数据元器件坏 驱动器主板坏 具体可以拿同型号伺服驱动器进行替换测试,提示:非专业人员请勿替换测试,以免损坏驱动器内电子元器件。
2、理论上是没有什么问题的,但很少有人这样用。原因就是如果使用同一品牌的伺服驱动器和伺服电机,直接按照使用手册提供的接线图接线就可以。
3、自动调整。安安川伺服主板改功率可以远程通讯,外部温度、压力等信号作为反馈信号,内部设定目标值,通过变频器自身来进行调整功率。功率是指物体在单位时间内所做的功的多少,即功率是描述做功快慢的物理量。
4、噪音大:这可能是驱动板或脉冲环形分配器的问题,需要进行更换。不能正常通讯:这可能是接口电路的问题,需要检查接口电路的连接是否正确,并逐级检查各个部件的状态,排除故障。
伺服电机怎样控制???
伺服电机的控制方式最常见的是速度控制模式,比如舞台上的氛围灯。通过控制电机不同的转速来实现光线的来回变化。最精确的是位置模式,比如组装车辆的机械臂,如果精度不够,无法实现准确的安装。
伺服电机系统有三种控制方式,即转矩控制,速度控制,位置控制。第一,转距控制是通过外部模拟量的输入或者直接的地址的赋值来设定电机轴对外输出转矩的大小,速度控制是通过模拟量的输入或者脉冲的频率对转动的速度进行控制。
伺服电机的控制方式:速度模式,力矩模式,位置模式。速度模式,通过对电机驱动脉冲的改变来控制电机的运转速度。比如舞台的灯光,可以加速也可以减速。力矩模式,输出的力矩是恒定的。
一般伺服电机都有三种控制方式:速度控制方式、转矩控制方式、位置控制方式。速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求满足何种运动功能来选择。
最常见的伺服电机控制模式是速度模式和力矩模式。速度模式通过改变电机的电流或者电压来改变电机转动的速度,达到想要的效果。力矩模式最常见的就是线切割,设定程序后设备保持一定的力矩进行切割。伺服电机分交流驱动和直流驱动。
欧姆龙PLC控制伺服电机时用的INI和PRV指令各是什么意思?
1、第1个INI 0 3 0 为停止脉冲输出0端口的脉冲输出 第2个INI 0 2 D10 ---变更脉冲输出的当前值为D10 注:INI的用法要比PRV多一些,具体的要看CP1H编程手册 PRV指令和INI指令的用法。
2、第一个 INI 指令:停止脉冲输出端口0的脉冲输出,使该端口对应的私服电机停转。第二个 INI 指令:改变端口0的脉冲输出的当前值,最新值在D10 D11 中指定。
3、SR、AR、DM、HR、LR。功能:用来控制高速计数器PV、脉冲输出PV,中断输出(计数模式)PV,或者由P、C指定的同步控制输入频率。注明:PRV(062)高速计数器PV读取指令,用编程器输入,按FUN键→ 6数字键→ 2数字键。
4、PLC断电前,读出高速计数器的当前值,并保存在D100、D101中,要用到PRV指令。PLC断电重启后,将D100、D101中记录到的数据恢复到高速计数器中,要用到INI指令。
PLC怎么控制伺服电机的速度?
PLC是通过控制发送的脉冲来控制伺服电机的,用物理方式发送脉冲,也就是使用PLC的晶体管输出是最常用的方式,一般是低端PLC采用这种方式。
表控TPC4-4TD,通过改变脉冲频率去改变伺服电机的转速。只需表格设置就可实现。没技术也能使用。此图为接两轴步进电机接线图,与伺服电机相同。输出端直接接电机,输入端可接各种感应开关。
一般都是用模拟量控制。伺服电机最主要的应用还是定位控制,PLC对伺服电机的位置控制。位置控制有两个物理量需要控制,那就是速度和位置,确切的说,就是控制伺服电机以多快的速度到达什么地方,并准确的停下。
如果你是通过plc的模拟量输出控制电机,就需要把伺服放大器上的模拟量信号接回到plc模拟量输入端口,通过ad模块转换成数字量从而得出伺服电机扭矩值。
到此,以上就是小编对于伺服电机控制主板故障的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏